


TARS Robotics combat Robot
GENERAL OVERVIEW
TARS Robotics UPV is a student-led organization at the Universitat Politècnica de València, driven by a strong passion for competitive robotics and technological innovation.
Currently, our team is focused on several key objectives:
- We are developing a highly advanced technological project: a rover-type robot designed to compete in the European Rover Challenge (ERC).
- We actively participate in combat robotics competitions at both national and international levels.
- We organize and collaborate in robotics-related events alongside organizations such as UN Robotics, UPV, and Digital Jove, promoting STEM and technological engagement.
In this photo you can see us presenting our current Rover called 'Rober-T0' on a university event.:


At present, we are preparing for an upcoming combat robotics competition, for which we are seeking sponsorship support. We are confident not only in our ability to compete at a high level, but also in our potential to achieve top results.
Securing strong performance in this competition will allow us to attract further sponsorship opportunities and continue expanding our reach. Our ultimate goal is to return to international competitions in Romania—where we have previously competed—and aim to secure victory on a larger stage.
Below, we present a detailed overview of the combat robot project we are currently developing:
ROBOT PROJECT BRIEF – ANTWEIGHT COMBAT ROBOT (500 g)
1. Overview
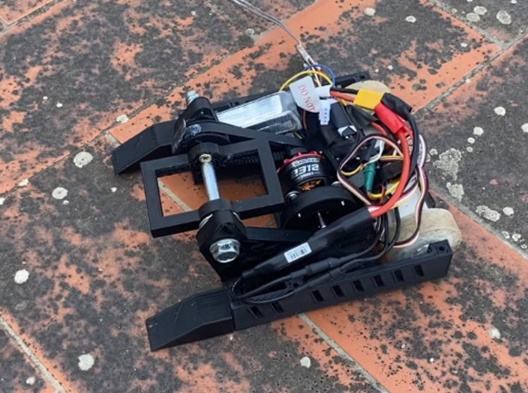
This project consists of the design and development of a combat robot in the antweight category (≤500 g), intended for competitive robotics environments.
The robot is designed to be compact, robust, and highly efficient, with a strong focus on maximizing performance under strict weight constraints.
At the current stage, the robot is fully developed except for the weapon system, which is the final component required to complete the build.
2. Weapon System (Manufacturing Request)
The robot features an active weapon system in the form of a horizontal eggbeater spinner, designed to be manufactured in titanium.
The weapon is designed to:
- Deliver high-energy impacts
- Maximize moment of inertia through optimized mass distribution
- Maintain fast spin-up and mechanical reliability
The system is powered by:
- A high-speed brushless motor (2450 KV) and a 3s LiPo battery.
- A GT2 belt drive transmission with an approximate 3:1 ratio
- Estimated weapon speed: 9,000–10,000 RPM
We are currently seeking manufacturing support for this component, ensuring precision, durability, and balance suitable for high-speed rotational systems.
3. Drive and Control System
The robot uses a differential drive system with two independent motors.
Control is achieved through:
- A FlySky radio transmitter with channel mixing
- A receiver powered via the ESC’s integrated BEC
This configuration provides:
- Precise maneuverability
- Intuitive tank-style control
- Simplified electronic integration
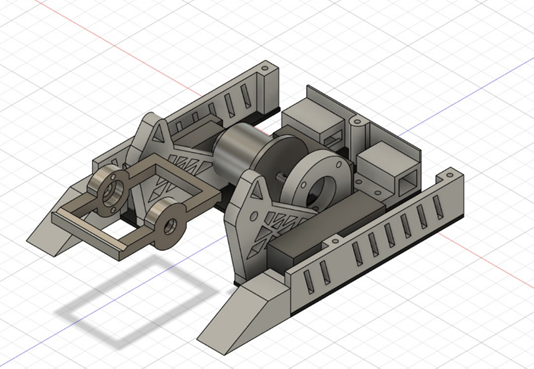
4. Mechanical Design
The structural design is optimized to:
• Minimize weight while maintaining strength to achieve this, various grooves and shapes have been designed
• Withstand both internal and external impact forces by combining different materials such as PLA, TPU, PETG or Carbon Fiber.
• Enable easy maintenance and component replacement with a neat and clever design
The robot is designed using CAD software (Fusion 360) for:
• Geometry optimization
• Mass and tolerance control
• Full system integration
5. Project Objectives
Develop a competitive antweight combat robot to compete in nationals and international competitions such as Robolid or Robochalenge.
Validate mechanical and electronic solutions in real combat scenarios
Optimize high-energy impact weapon systems
6. Timeline and Current Status
The project is currently in its final stage. All systems have been designed and prepared except for the weapon, which is pending manufacturing.
The goal is to complete the robot in time to compete on April 11th at the Robolid competition.
For this reason, the manufacturing of the weapon is currently the critical path of the project.
7. Project Value
This project enables the application of knowledge in:
- Advanced mechanical design
- Electronics and control systems
- Compact system integration
- Optimization under strict weight constraints
It also serves as a practical platform for innovation in high-energy dynamic systems in small-scale robotics.
8. Request
We are looking for a manufacturing partner capable of producing the titanium eggbeater with high precision, good surface finish, and proper balance for high-speed operation.
We are available to provide CAD files, technical drawings, and any additional specifications required for production.
https://drive.google.com/file/d/15oH2h44y_TumC34P_sl677cPuUJ-78KJ/view?usp=sharing
We encourage you to visit our social media platforms to discover our projects, our achievements, and the commitment that drives our team:
Web: www.tarsupv.com
Instagram: @tars_upv
LinkedIn: TARS UPV

- UPV
- Student Team
- Competition
- Robot
- Robotics
You might like








- Comments(0)
- Likes(0)