

WE MARS Power Distribution Platform
Background
The Western Engineering Mobile Advanced Robotics Society (WE MARS) is a Student Led University Robotics club where our goal is to compete and ultimately win the Canadian International Rover Challenge (CIRC). One thing that we do is try to build as much ourselves as possible. In this project we have a custom made Power Distribution Platform which takes an input of 12V and outputs power for radios motors and data modules such as the Jetson Orin Nano and custom made RF module! This platform isnt just 1 board, HECK, its not 2, 3, or 4. This platform here connects up to 9 BOARDS onto 1 single system!!! This benefits us since we try to make the rover as small as possible and this platform will help us with power efficiency and wire management with hardly any wires required!
The Boards
MOTHERBOARD
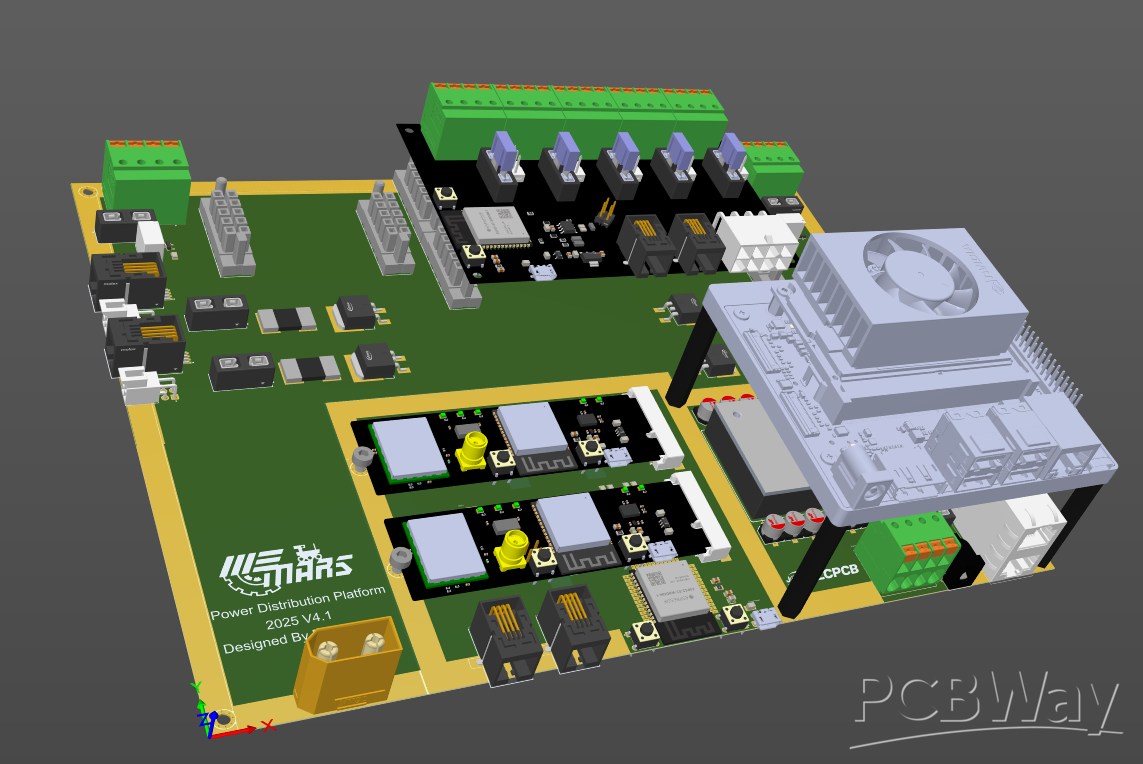
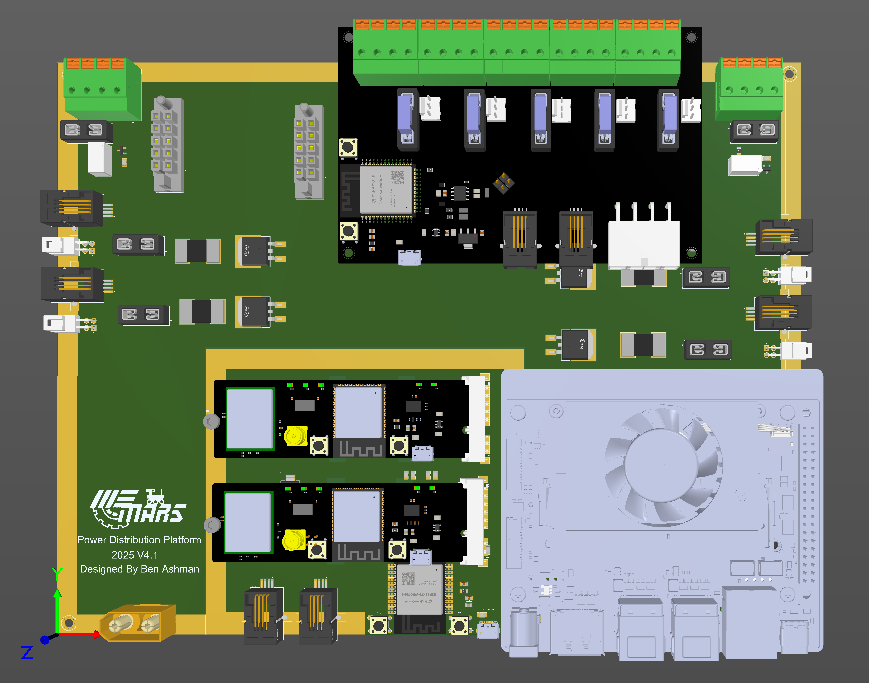
The motherboard is the main PCB of the whole system. It has 2 high power connecters at the top for the Arm Daughter Board and another set of connectors which use is TBD. The board at top left and right corners also has connectors for lights which relays to turn them on and off with an ESP32 MCU. To the left and right there are RJ10 connectors which are used for CANbus communication (our main communication network on the rover) and molex 46A connectors to provide power to 4 daughter board motor controllers which, as you can probably guess, control the wheels of the rover. Now at the bottom right of the rover, there is the jetson orin nano power supply which is regulated at 12V using a buck/boost converter and a custom made 24V PoE adapter that takes the data from the Jetson via ethernet and transports to our radios where we receive the communications at home base. Lastly, we have the logic section of the board which has 2 M.2 connectors for data daughter boards such as our RF board and a TBD board as well as the main can transceiver and some low power power electronics.
RF Board
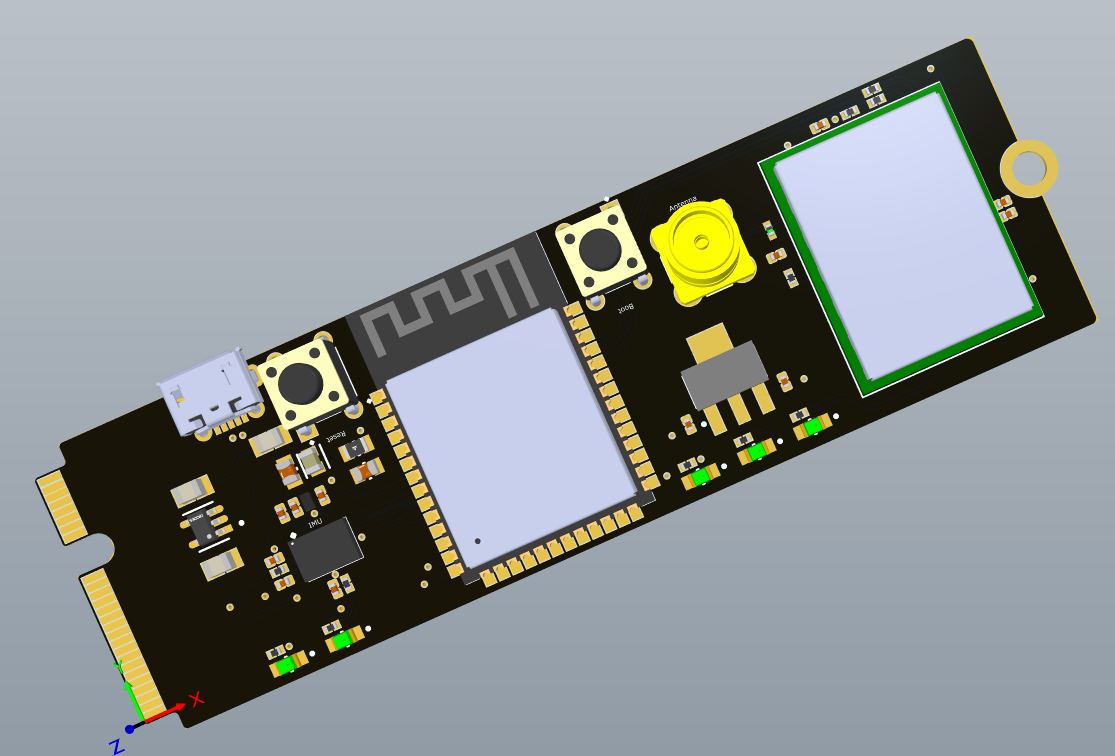
The RF board is made up of a GNSS Receiver with Reak-Time Kinematic (RTK) capabilities mean i ng we can get as accurate as 1cm accuracy with that GNSS! There is also an adafruiot B90085 IMU which will be used to help indicate the rovers tilt and both chips will be used for our Autonomous Navigation Development!
The M.2 Style interface was chosen to make this 1 time ordered module easy to transfer from board to board and allow for a wireless high speed connection to main platform!
This Project is currently ongoing and RF board is the only one with a semi-final design. The motherboard is getting some improvements that need to be tested first and the Arm board and the Motor controllers are currently still being built. This club is not only used to compete, but also a learning opportunity for younger engineering students to dive into the world of electronic design. This modular approach to designing the power platform will allow for the younger students in 2nd year and even some in their first year to try making a board and if it doesn't work, no big deal, we can just look at why and fix it for the next revision!
This is part 1 of the Power Distribution Platform, Part 2 coming when new developments have been made!
- Modular Design
- M2PCIe Interface
- IMU
- GNSS Recievers
- RF Design
- Buck-Boost Converters
- Student Design Teams
- Student Made
- Power Electronics
- Rovers
You might like








- Comments(0)
- Likes(0)