


Ecocar Unicamp
The Ecocar Unicamp is a undergraduate team for the Estate University of Campinas (Unicamp), Brazil, and we develop and build an electric urban concept for the Eco shell marathon competition.
The team was founded in 2002 by Mechanical Engineering students under the guidance of Prof. Dr. Caio Glauco Sanchez. The team emerged alongside the University Energy Efficiency Marathon, a competition in which they participated until 2014.
Our original mission was to provide students with hands-on project experience, allowing them to hone their interpersonal skills and technical abilities while fostering sustainability. The "Eco" in our name stands for "Economical," emphasizing our focus on developing efficient, accessible technologies to build a better future.
Today, the team comprises 13 undergraduate students from diverse disciplines, including Mechanical Engineering, Electrical Engineering, Computer Science, Physics, Economics, and more. Under the advice of Prof. Rogério Gonçalves dos Santos, we continue to innovate in energy efficiency.
We are proud to see our founding vision realized through our alumni, who now apply the skills they gained in the team to their careers and research across engineering fields. Their work contributes to a more efficient and sustainable world, proving that our early efforts to inspire progress have made a lasting impact.
Now we compete in the Shell Eco-marathon under the Urban Concept category, where we hold the distinction of being the first Latin American team to participate. Staying true to our sustainability goals, we embrace the added challenge of designing and building an electric vehicle.
Our project involves custom electrical components, many of which are developed entirely for scratch by our team. Most require bespoke circuitry, currently assembled using perforated prototype boards. Transitioning to custom PCB fabrication would significantly enhance the quality, reliability, and professionalism of our vehicle. Beyond technical improvements, this upgrade offers our members a valuable opportunity to master PCB design and manufacturing skills critical to their future careers in engineering and technology.
Current Projects
Telemetry System
We will continue improving the existing telemetry system, it is passed on server nodes that communicate with the order by can, implementing new sensors for data collection, including:
- Motor current, voltage, and power
- Battery temperature
- External temperature
These new sensors will complement those already in operation, which monitor:
- Cabin temperature
- Speed
- Acceleration
- Inclination
- Altitude
- Compass
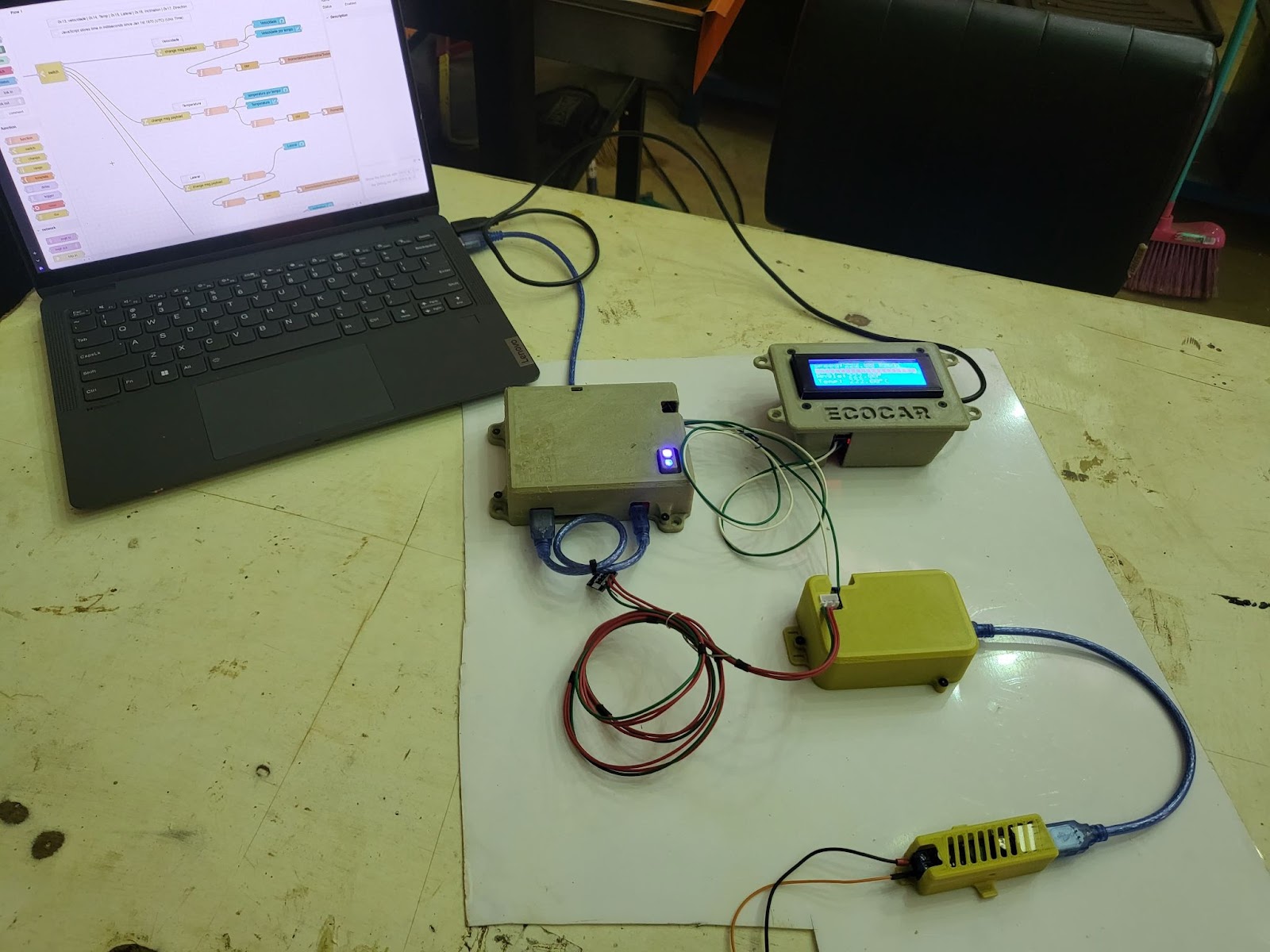
Figure 1: Picture of the can network prototype
Nodes of the data system
With the implementation of the CAN bus for peripheral control, the entire electrical system of the car will be structured into nodes. To simplify manufacturing and installation, we developed a unified design for these nodes, ensuring greater efficiency and standardization in vehicle integration.
Each node will consist of:
- An Arduino Nano
- An MCP2025 module (responsible for CAN communication)
- Standardized connectors for any device that can be attached to the node
These components were chosen for their ease of use and availability in stores within our country. This makes any emergency repair much easier.
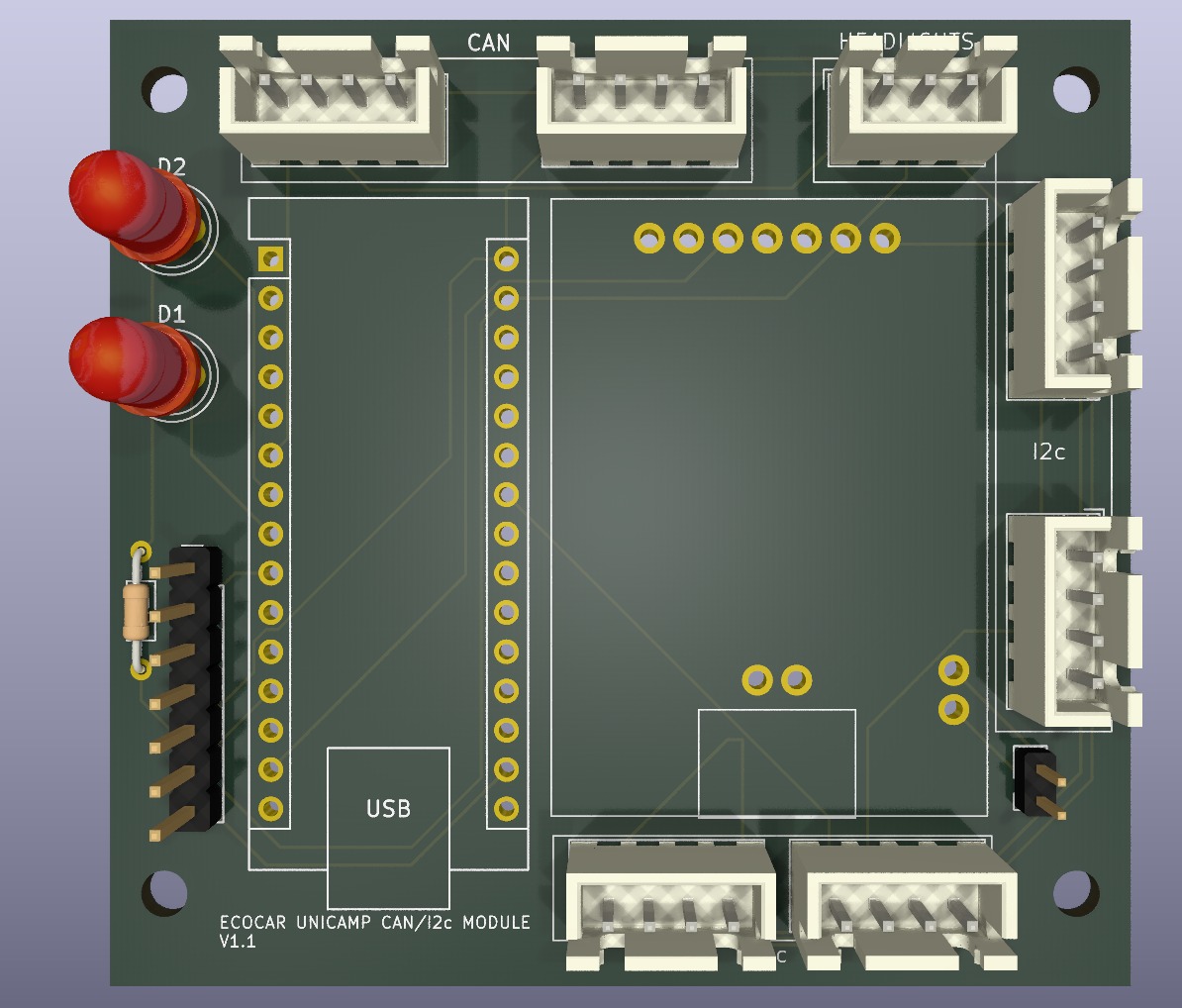
Figure 2: Picture of the generic node module project
Central Computing System
We currently use a BeagleBone Black (BBB) as our central computer. It employs a CAN-to-Serial broker to read and log data. Additionally, we use Node-RED software running on the BBB to process data, which allows us to easily add nodes and modify how the vehicle handles information.
This season, we plan to upgrade to a Raspberry Pi 5 to streamline the car's systems. The new hardware’s modern architecture ensures longevity for years to come. The improved graphical performance will also enable a more advanced interface to display Node-RED data to the driver via an LCD screen mounted on the steering wheel.

Figure 3: Picture of the sterling well with the lcd screen
Power Train
We will also keep the same motor and battery pack, as they meet all of our needs.
Our current motor is the BG 95x80, a BLDC 3-phase motor provided by Ametek Motors, with a nominal power output of 1127W operating at 48V. The motor is equipped with a gear reduction, which provides better starting torque and allows the motor to operate at an RPM where it achieves better efficiency.
Our battery pack is a 13 by 7 cells pack, made with 18650 cells and a Daly BMS. It has approximately 1 kWh of capacity and provides 48V with a maximum current output of 30A.
Motor controller
This year, we're upgrading our motor controller with a new version based on the EasyController 3 (EC3) , an open source BLDC motor controller. While retaining all EC3 features, such as current sensing and enhanced motor control efficiency, we're redesigning it to use more common components. This modification will simplify assembly and reduce overall project costs.
A key improvement is the direct integration of a CAN bus module into the controller. This allows real-time access to critical data (e.g., motor current and RPM) without requiring additional nodes or sensors, further streamlining the system's architecture.
- Car concept
- Urban concept
- Shell Eco marathon
- Efficiency
- Electric car
You might like








- Comments(0)
- Likes(0)