

Cal Poly UROV (Underwater Remote Operated Vehicle)

About Us
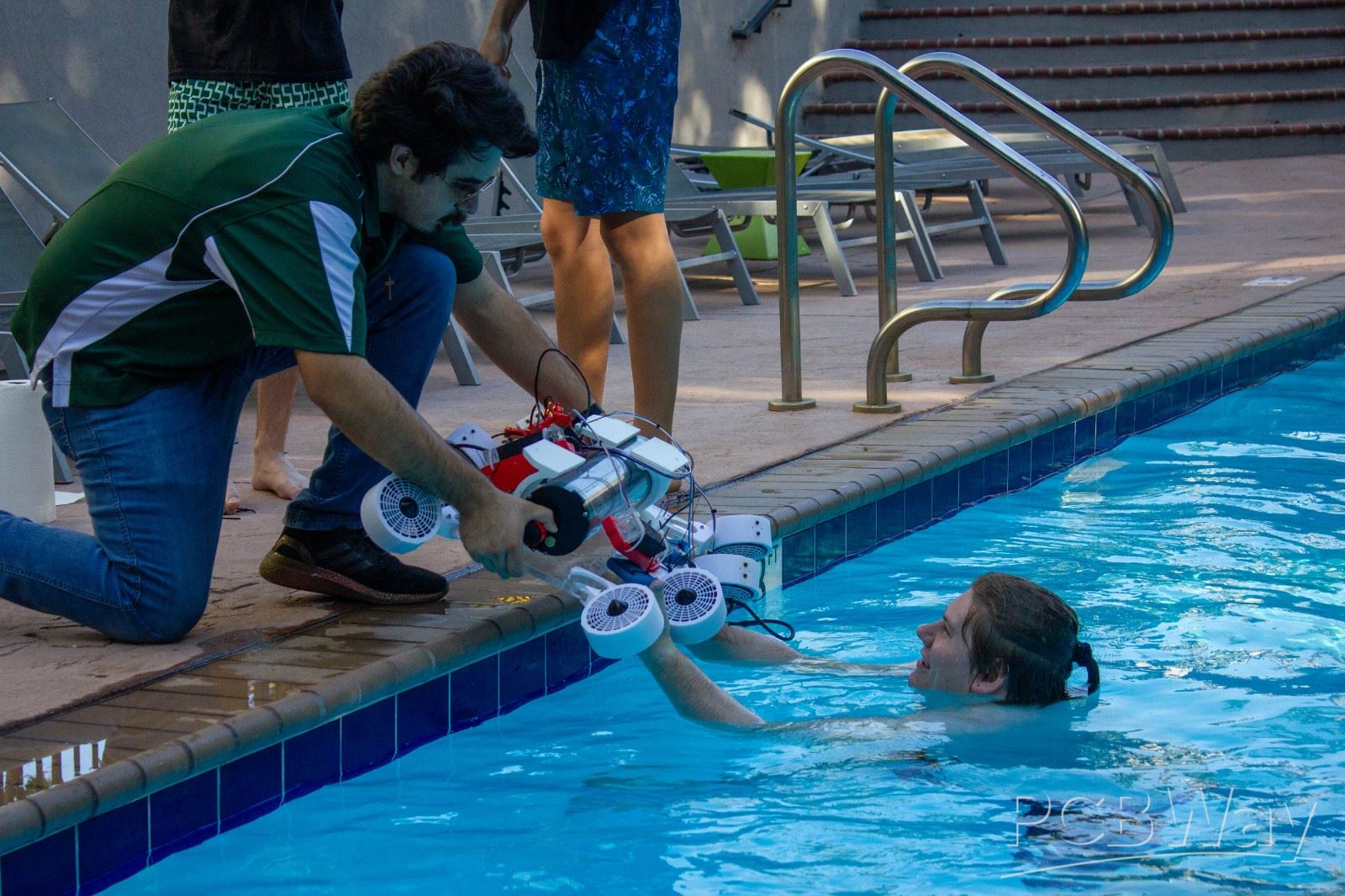
Cal Poly UROV is a student-run engineering team from California Polytechnic State University, San Luis Obispo. Since our foundation, we have competed at the MATE ROV World Competiton 3 times. Our multidisciplinary team is driven by a passion for hands-on innovation and real-world engineering challenges.

Our Project
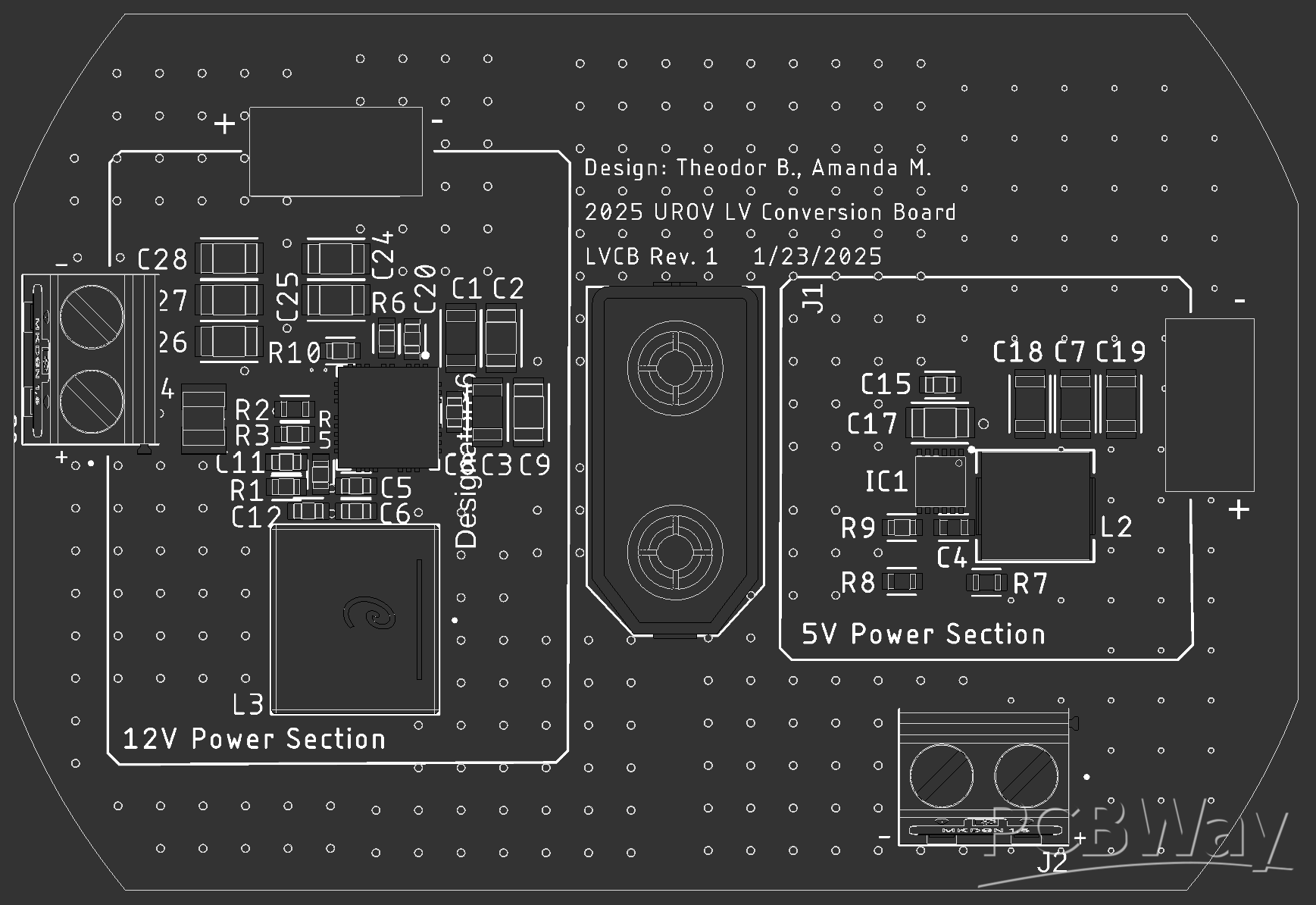
The focus of our project is to develop a Remotely Operated Vehicle (ROV) equipped for real-world marine ecological studies and engineering tasks — including shipwreck investigation, wildlife population monitoring, and underwater infrastructure repair. Marine environments present unique and demanding design challenges, which is why we prioritize in-house design and manufacturing. Being able to create custom PCBs would greatly optimize the ROV’s electrical systems, allowing for a healthier project! Key components we’re focusing on include:
· Microcontroller boards: Optimized for control and sensing.
· Signal routing boards: Clean wire management and better noise control.
· DC-DC converters: Efficient, spec-driven power delivery.
Why PCBWay?
Custom PCBs let us move faster and learn more — but as a student-led project, cost is a real barrier. With PCBWay’s high standard for quality, their support will be imperative to the iterative design process, to the evolution of the scope of our project, and to the provision of real-world design experience.
We’d be proud to have PCBWay as a partner as we continue to cultivate Cal Poly UROV. With PCBWay’s support, we can create optimized electrical systems, foster more opportunities for hands-on engineering, and bring a standout ROV to this year’s competition.
- robotics competition
- materov world competition
- robotics
- calpoly slo
- california polytechnic university
- california polytechnic robotics
- calpoly
- calpoly robotics
- rov
- materov
- underwater robotics
You might like







- Comments(0)
- Likes(0)